The Yost Labs 3-Space Sensor™ LX is an ultra-miniature, high-precision, high-reliability, low-cost SMT Attitude and Heading Reference System (AHRS) / Inertial Measurement Unit (IMU) which uses triaxial gyroscope, accelerometer, and compass sensors in conjunction with advanced processing and on-board quaternion-based orientation filtering algorithms to determine orientation relative to an absolute reference in real-time.
Key Features
The Yost Labs 3-Space Sensor™ LX is a highly flexible, low-cost, high-performance AHRS / IMU inertial motion sensor package that is perfect for a wide variety of projects requiring a reliable orientation sensing solution.
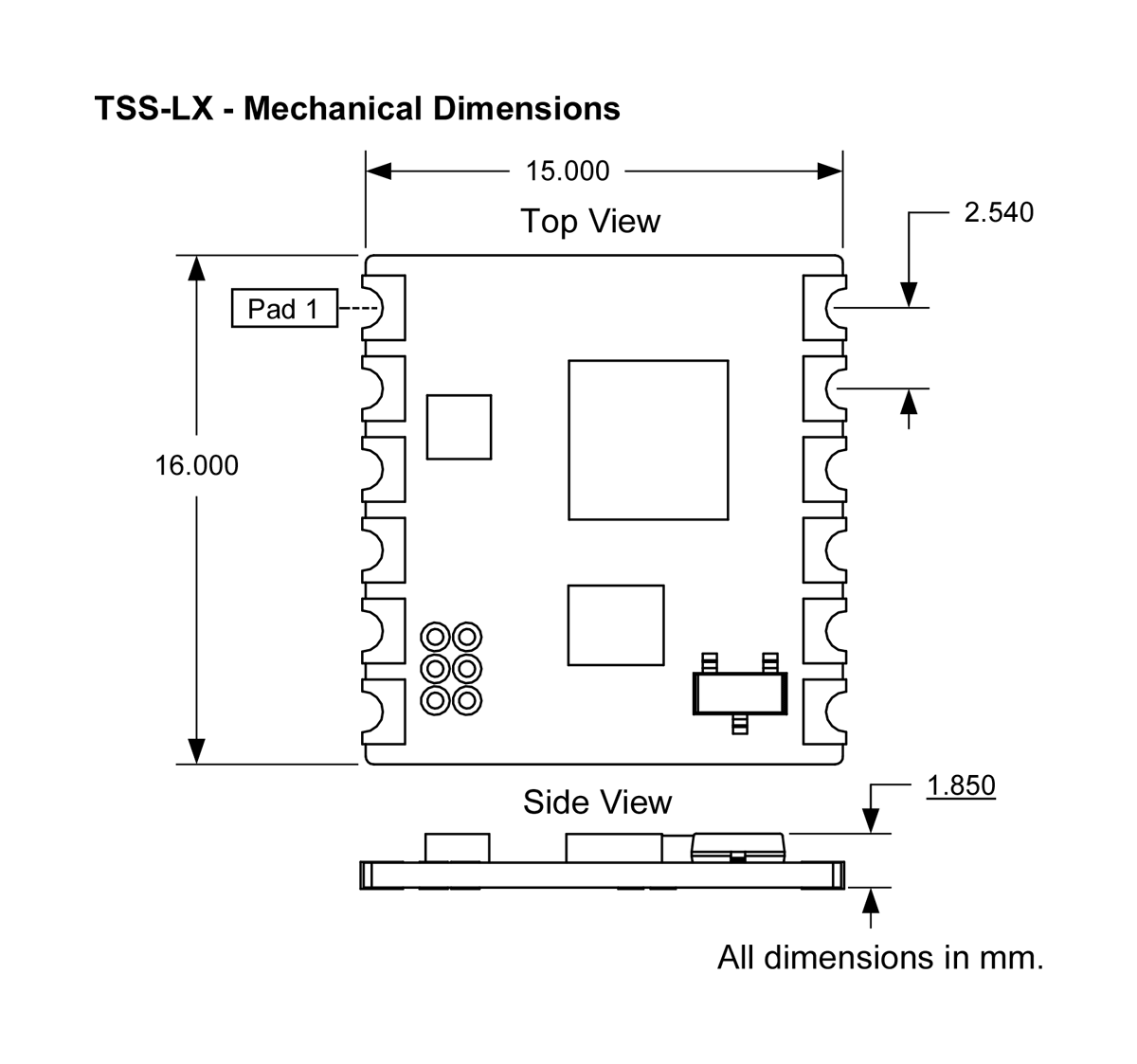
- Ultra-small high-performance AHRS at 16mm x 15mm x 1.7mm and 0.9 grams
- Open Source API Available
- Fast sensor update and filter rate allow use in real-time applications, including stabilization, virtual reality, pedestrian tracking, real-time immersive simulation, and robotics
- Advanced on-board magnetometer auto-calibration allows the sensor to quickly adapt to changing magnetic environments.
- Highly customizable orientation sensing with options such as tunable filtering, oversampling, and orientation error correction
- Advanced integrated QGRAD2TM filtering allows sensor orientation outputs at up to 1750Hz while automatically reducing the effects of sensor noise and sensor error
- Robust open protocol allows commands to be sent in human readable form, or more quickly in machine readable form
- Orientation output format available in absolute or relative terms in multiple formats (quaternion, rotation matrix, axis angle, two-vector)
- Absolute or custom reference axes
- Access to raw sensor data
- Embedded pedestrian tracking
- Flexible communication options: SPI, I2C, USB 2.0, or asynchronous serial USB communication through a virtual COM port
- Castellated SMT edge pads provide secure SMT mounting and allow optional through-hole mounting
- Upgradeable firmware
- Programmable interrupt capability
- Development kit available
Motion tracking for any project
Recognized as one of the best university startups in 2017, Yost Labs best-in-class sensors and engineering staff are here to provide the fastest inertial motion tracking for your work. We can engineer custom solutions for your projects.
Contact Us